应广单片机Padauk开发实战:低成本高效解决方案
0.07美元LED驱动方案+工业级代码案例解析,含PFS154七段屏驱动代码、PMB180温控算法等完整开发实例
一、可链接七段LED显示集群深度优化
芯片型号:PFS154-S16
协议设计创新点
轻量级串行协议:采用类UART 8N1格式,但仅使用5位有效数据(对应0-9数字编码),时钟容差提升至±4%,适应未校准的16MHz IHRC3。
同步更新机制:状态机包含接收→转发→更新三态,EOT(0x00)触发全链显示刷新,消除级联延迟差异。
关键代码段(SDCC编译器)
#include
#include
// 硬件定义
#define RX_PIN PA0 // 数据接收引脚
#define TX_PIN PA6 // 数据转发引脚
#define EOT 0x00 // 结束符
#define MAX_DISPLAYS 32 // 最大支持显示器数量
// 状态机定义
typedef enum {
RECV, // 接收模式
FORWARD, // 转发模式
UPDATE // 更新显示
} State_t;
// 全局变量
volatile uint8_t segment_data = 0;
volatile State_t STATE = RECV;
volatile uint8_t display_index = 0;
// 七段数码管0-9编码表(共阴极)
const uint8_t seg_table[10] = {
0x3F, // 0
0x06, // 1
0x5B, // 2
0x4F, // 3
0x66, // 4
0x6D, // 5
0x7D, // 6
0x07, // 7
0x7F, // 8
0x6F // 9
};
// 初始化函数
void init_uart() {
// 设置PA0为输入(接收引脚)
PADIER |= (1 << RX_PIN);
// 设置PA6为输出(转发引脚)
PAC |= (1 << TX_PIN);
// 设置PB端口为输出(段码驱动)
PBC = 0xFF;
// 启用引脚变化中断
INTEN |= INT_PA0;
INTEGS |= EDGE_FALLING; // 下降沿触发
}
// 中断服务程序
void interrupt(void) __interrupt(0) {
if (INTF & INT_PA0) { // PA0引脚变化中断
INTF &= ~INT_PA0; // 清除中断标志
UART_Handler(); // 调用UART处理函数
}
}
// UART处理函数
void UART_Handler() {
static uint8_t bit_count = 0;
static uint8_t rx_byte = 0;
// 接收起始位检测
if (bit_count == 0) {
if (!PA & (1 << RX_PIN)) {
bit_count = 1;
rx_byte = 0;
}
return;
}
// 接收8位数据(含起始位)
if (bit_count < 9) {
// 在数据位中间采样
_delay_us(52); // 在16MHz下约52us (1/19200)
uint8_t bit_val = (PA & (1 << RX_PIN)) ? 1 : 0;
if (bit_count >= 1 && bit_count <= 8) {
rx_byte |= (bit_val << (bit_count - 1));
}
bit_count++;
return;
}
// 接收结束位
bit_count = 0;
// 状态机处理
if (STATE == RECV) {
if (rx_byte != EOT) {
// 只取低5位用于显示
segment_data = rx_byte & 0x1F;
} else {
STATE = FORWARD;
}
}
if (STATE == FORWARD) {
// 转发数据
if (rx_byte == EOT) {
STATE = UPDATE;
} else {
// 模拟UART发送
PA &= ~(1 << TX_PIN); // 起始位
_delay_us(104);
for (uint8_t i = 0; i < 8; i++) {
if (rx_byte & (1 << i)) {
PA |= (1 << TX_PIN);
} else {
PA &= ~(1 << TX_PIN);
}
_delay_us(104);
}
PA |= (1 << TX_PIN); // 停止位
_delay_us(104);
}
}
if (STATE == UPDATE) {
update_display(segment_data);
STATE = RECV;
}
}
// 显示驱动函数(带PWM调光)
void update_display(uint8_t num) {
uint8_t seg_code = seg_table[num % 10];
// 软件PWM调光(占空比25%)
for (uint8_t cycle = 0; cycle < 4; cycle++) {
if (cycle == 0) {
PB = seg_code; // 开启显示
} else {
PB = 0x00; // 关闭显示
}
_delay_ms(1); // PWM周期约4ms
}
}
// 主函数
void main() {
// 初始化
MISC = 0b00000010; // 启用IHRC 16MHz
CLKMD = 0b00100000;
while (!(CLKMD & 0b00000001)); // 等待时钟稳定
init_uart();
EI(); // 全局中断使能
// 主循环
while (1) {
// 睡眠模式降低功耗
SLEEP();
}
}
硬件优化:取消限流电阻,采用PB端口直驱+软件PWM调光(占空比25%),降低BOM成本。
二、家电与工业自动化开发实例
电磁炉温控系统(PMB180)
温度闭环控制流程
- ADC每100ms采样NTC热敏电阻(通道AD8)
- 查表法将ADC值转换为温度(OTP存储校准点)
- PID算法输出PWM占空比(8位Timer0实现)
关键代码
#include
#include
// PID参数
#define KP 2.5f
#define KI 0.1f
#define KD 0.5f
#define SAMPLE_TIME 100 // ms
// 温度范围
#define MIN_TEMP 50
#define MAX_TEMP 250
#define SAFE_TEMP 280 // 过热保护阈值
// 温度校准点结构体
typedef struct {
uint16_t adc_value;
uint8_t temp_celsius;
} TempPoint;
// 温度校准表
const TempPoint temp_table[] = {
{800, 25}, // 25°C
{700, 50}, // 50°C
{600, 75}, // 75°C
{500, 100}, // 100°C
{400, 125}, // 125°C
{300, 150}, // 150°C
{200, 175}, // 175°C
{100, 200}, // 200°C
{50, 225}, // 225°C
{25, 250} // 250°C
};
// PID控制器
typedef struct {
float setpoint;
float integral;
float prev_error;
} PIDController;
// 全局变量
volatile PIDController pid = {100.0f, 0.0f, 0.0f}; // 默认100°C
volatile uint8_t current_pwm = 0;
// 初始化ADC
void init_adc() {
ADCR = 0b10001000; // 选择ADC8通道,启用ADC
ADCCR = 0b00000000; // 参考电压VDD
}
// 读取ADC值
uint16_t read_adc() {
ADCR |= 0b00000001; // 启动转换
while (ADCR & 0b00000001); // 等待转换完成
return (ADCD << 8) | ADCDL; // 12位ADC值
}
// ADC值转换为温度
uint8_t adc_to_temp(uint16_t adc_val) {
// 查找表转换
for (uint8_t i = 1; i < sizeof(temp_table)/sizeof(TempPoint); i++) {
if (adc_val >= temp_table[i].adc_value) {
// 线性插值
uint16_t adc_diff = temp_table[i-1].adc_value - temp_table[i].adc_value;
uint8_t temp_diff = temp_table[i-1].temp_celsius - temp_table[i].temp_celsius;
return temp_table[i].temp_celsius +
(uint8_t)((temp_diff * (adc_val - temp_table[i].adc_value)) / adc_diff);
}
}
return MAX_TEMP; // 超出范围
}
// PID计算
uint8_t pid_control(uint8_t current_temp) {
float error = pid.setpoint - current_temp;
// 积分项(带抗饱和)
pid.integral += KI * error;
if (pid.integral > 255) pid.integral = 255;
if (pid.integral < 0) pid.integral = 0;
// 微分项
float derivative = KD * (error - pid.prev_error);
pid.prev_error = error;
// PID输出
float output = KP * error + pid.integral + derivative;
// 限制输出范围
if (output > 255) output = 255;
if (output < 0) output = 0;
return (uint8_t)output;
}
// PWM初始化
void init_pwm() {
// 使用Timer0 PWM模式
TM0C = 0b00100000; // PWM模式,时钟源IHRC/4
TM0S = 0b00000100; // 分频器4分频 (16MHz/4=4MHz)
TM0B = 0; // 占空比初始0
TM0CT = 0; // 计数器清零
TM0C |= 0b10000000; // 启用Timer0
}
// 设置PWM占空比
void set_pwm(uint8_t duty) {
TM0B = duty;
}
// 温度保护
void temp_protection(uint8_t current_temp) {
if (current_temp > SAFE_TEMP) {
// 过热保护
set_pwm(0); // 关闭加热
while (1) { // 进入保护状态
// 闪烁报警LED
PA ^= (1 << PA3);
_delay_ms(500);
}
}
}
// 主函数
void main() {
// 时钟初始化
MISC = 0b00000010; // IHRC 16MHz
CLKMD = 0b00100000;
while (!(CLKMD & 0b00000001));
// 外设初始化
init_adc();
init_pwm();
// 主循环
while (1) {
// 读取温度
uint16_t adc_val = read_adc();
uint8_t current_temp = adc_to_temp(adc_val);
// 温度保护
temp_protection(current_temp);
// PID控制
current_pwm = pid_control(current_temp);
set_pwm(current_pwm);
// 采样间隔
_delay_ms(SAMPLE_TIME);
}
}
流水线计数装置(PMB180+24C02 EEPROM)
掉电保护策略
每1000次计数写入EEPROM,避免频繁擦写
启动时从24C02读取累计值
uint32_t read_count() {
uint32_t count = 0;
i2c_start();
i2c_write(0xA0); // EEPROM地址
i2c_write(0x00); // 数据地址高字节
i2c_write(0x00); // 低字节
count = (i2c_read() << 16); // 读取24位数据
count |= (i2c_read() << 8);
count |= i2c_read();
return count;
}
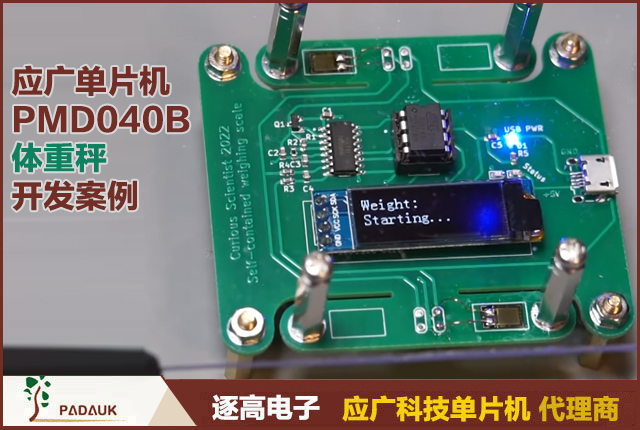
三、消费电子超低成本实现
电子秤(PMB180)
动态校准算法
#include
#include
// 参数存储地址
#define ZERO_ADDR 0x10
#define SCALE_ADDR 0x14
// 全局变量
float zero_val = 0.0f;
float scale_factor = 1.0f;
// ADC初始化
void init_adc() {
ADCR = 0b10000000; // 选择ADC0通道
ADCCR = 0b00000000; // VDD参考
}
// 读取ADC值
uint16_t read_adc() {
ADCR |= 0b00000001; // 启动转换
while (ADCR & 0b00000001); // 等待完成
return (ADCD << 8) | ADCDL;
}
// 读取校准参数
void read_calibration() {
// 从SRAM读取零点值
uint8_t *zero_ptr = (uint8_t*)ZERO_ADDR;
zero_val = *(float*)zero_ptr;
// 从SRAM读取比例因子
uint8_t *scale_ptr = (uint8_t*)SCALE_ADDR;
scale_factor = *(float*)scale_ptr;
}
// 保存校准参数
void save_calibration() {
// 保存零点值到SRAM
uint8_t *zero_ptr = (uint8_t*)ZERO_ADDR;
*(float*)zero_ptr = zero_val;
// 保存比例因子到SRAM
uint8_t *scale_ptr = (uint8_t*)SCALE_ADDR;
*(float*)scale_ptr = scale_factor;
}
// 零点校准
void calibrate_zero() {
// 10次采样平均
float sum = 0;
for (uint8_t i = 0; i < 10; i++) {
sum += (float)read_adc();
_delay_ms(10);
}
zero_val = sum / 10.0f;
save_calibration();
}
// 重量校准
void calibrate_weight(float known_weight) {
// 10次采样平均
float sum = 0;
for (uint8_t i = 0; i < 10; i++) {
sum += (float)read_adc();
_delay_ms(10);
}
float ref_val = sum / 10.0f;
scale_factor = (ref_val - zero_val) / known_weight;
save_calibration();
}
// 获取重量(带滤波)
float get_weight() {
// 移动平均滤波
static float filter_buffer[5] = {0};
static uint8_t index = 0;
float raw_val = (float)read_adc() - zero_val;
filter_buffer[index] = raw_val;
index = (index + 1) % 5;
float sum = 0;
for (uint8_t i = 0; i < 5; i++) {
sum += filter_buffer[i];
}
return (sum / 5.0f) / scale_factor;
}
// 主函数
void main() {
// 初始化
MISC = 0b00000010; // IHRC 16MHz
CLKMD = 0b00100000;
while (!(CLKMD & 0b00000001));
init_adc();
read_calibration();
// 主循环
while (1) {
float weight = get_weight();
// 显示重量逻辑
// ...
_delay_ms(100);
}
}
电子烟驱动(PMS171B)
大电流驱动配置
// 直接驱动电机振动
void motor_control(uint8_t power) {
set_pwm(PB7, power); // PB7输出PWM(0-100%)
}
四、智能家居与医疗健康开发精要
智能照明系统(PFS123)
光强自适应逻辑
void adjust_brightness() {
uint16_t light = read_adc(LIGHT_SENSOR);
uint8_t pwm = (light < LIGHT_THRESH) ? MAX_BRIGHT : (light / SCALE_FACTOR);
set_pwm(LED_PIN, pwm);
}
血氧监测仪(PMS152E)
SPI传感器数据采集
#include
#include
// SPI定义
#define SPI_CLK PA0
#define SPI_MOSI PA1
#define SPI_MISO PA2
#define SPI_CS PA3
// 传感器命令
#define CMD_START_MEASURE 0x01
#define CMD_READ_DATA 0x02
// SPI初始化
void spi_init() {
// 设置引脚方向
PAC |= (1 << SPI_CLK) | (1 << SPI_MOSI) | (1 << SPI_CS); // 输出
PAC &= ~(1 << SPI_MISO); // 输入
// 初始状态
PA |= (1 << SPI_CS); // CS高电平(不选中)
PA &= ~(1 << SPI_CLK); // 时钟低电平
}
// SPI发送接收字节
uint8_t spi_transfer(uint8_t data) {
uint8_t received = 0;
// 片选使能
PA &= ~(1 << SPI_CS);
_delay_us(1);
for (uint8_t i = 0; i < 8; i++) {
// 设置MOSI
if (data & 0x80) {
PA |= (1 << SPI_MOSI);
} else {
PA &= ~(1 << SPI_MOSI);
}
data <<= 1;
// 时钟上升沿
PA |= (1 << SPI_CLK);
_delay_us(1);
// 读取MISO
received <<= 1;
if (PA & (1 << SPI_MISO)) {
received |= 0x01;
}
// 时钟下降沿
PA &= ~(1 << SPI_CLK);
_delay_us(1);
}
// 片选禁用
PA |= (1 << SPI_CS);
return received;
}
// 启动测量
void start_measurement() {
spi_transfer(CMD_START_MEASURE);
_delay_ms(10); // 等待传感器准备
}
// 读取血氧数据
void read_oxygen_data(uint16_t *heart_rate, uint16_t *spo2) {
spi_transfer(CMD_READ_DATA);
uint8_t data[4] = {0};
for (uint8_t i = 0; i < 4; i++) {
data[i] = spi_transfer(0x00);
}
*heart_rate = (data[0] << 8) | data[1];
*spo2 = (data[2] << 8) | data[3];
}
// 计算血氧饱和度
uint8_t calculate_spo2(uint16_t spo2_value) {
// 传感器特定校准公式
return (spo2_value * 0.8) + 20; // 示例公式
}
// 主函数
void main() {
// 初始化
MISC = 0b00000010; // IHRC 16MHz
CLKMD = 0b00100000;
while (!(CLKMD & 0b00000001));
spi_init();
// 启动测量
start_measurement();
// 主循环
while (1) {
uint16_t heart_rate, spo2_value;
read_oxygen_data(&heart_rate, &spo2_value);
uint8_t spo2 = calculate_spo2(spo2_value);
// 数据处理和传输
// ...
_delay_ms(500); // 每500ms读取一次
}
}
五、开发工具链实战示例
FreePDK编程器搭建
硬件:STM32F072C8T6 + 电平转换电路(支持3.3V/5V)
烧录命令
easypdkprog -n PFS154 write blink.ihx # 烧录LED闪烁固件
PFS154的Hello World(LED闪烁)
#include
#include
// 硬件定义
#define LED_PIN PA4
#define BUTTON_PIN PA3
// 精确延时函数(ms)
void delay_ms(uint16_t ms) {
// 使用Timer0实现精确延时
TM0C = 0b00000000; // 系统时钟,无分频
TM0S = 0b00000000; // 分频器1:1
TM0B = 0; // 比较值
for (uint16_t i = 0; i < ms; i++) {
TM0CT = 0; // 计数器清零
TM0C |= 0b01000000; // 启用Timer0
// 等待1ms (16MHz时钟)
while (TM0CT < 16000); // 16000 cycles = 1ms
TM0C &= ~0b01000000; // 禁用Timer0
}
}
// 按钮检测(带防抖)
uint8_t is_button_pressed() {
static uint8_t last_state = 1;
static uint16_t debounce_timer = 0;
uint8_t current_state = PA & (1 << BUTTON_PIN) ? 1 : 0;
if (current_state != last_state) {
debounce_timer = 500; // 50ms防抖时间
}
if (debounce_timer > 0) {
debounce_timer--;
if (debounce_timer == 0) {
last_state = current_state;
return (current_state == 0); // 按钮按下返回1
}
}
return 0;
}
// 主函数
void main() {
// 时钟初始化
MISC = 0b00000010; // IHRC 16MHz
CLKMD = 0b00100000;
while (!(CLKMD & 0b00000001)); // 等待时钟稳定
// 设置LED引脚为输出
PAC |= (1 << LED_PIN);
// 设置按钮引脚为输入(带上拉)
PAC &= ~(1 << BUTTON_PIN);
PAPH |= (1 << BUTTON_PIN); // 上拉电阻
uint8_t blink_speed = 1; // 默认闪烁速度
uint16_t delay_time = 500; // ms
// 主循环
while (1) {
// 检测按钮
if (is_button_pressed()) {
blink_speed = (blink_speed % 3) + 1; // 切换速度1-3
switch (blink_speed) {
case 1: delay_time = 500; break; // 慢速
case 2: delay_time = 250; break; // 中速
case 3: delay_time = 100; break; // 快速
}
}
// LED闪烁
PA ^= (1 << LED_PIN); // 翻转LED
delay_ms(delay_time);
}
}
编译命令
sdcc -mpdk14 -c blink.c && sdld -mpdk14 blink.rel5
开发实践建议
选型策略
| 需求类型 | 推荐型号 | 关键优势 |
|---|---|---|
| 超低成本控制 | PMS150C | $0.03单价,OTP存储 |
| 数据存储 | PGS134 | 512B EEPROM,10万次擦写 |
| 高精度模拟 | PMB180 | 12位ADC,±1%误差 |
功耗优化技巧
睡眠模式优化
睡眠模式下启用快速唤醒(<10μs)
未用ADC通道设为数字输入防漏电
PADIER = 0x00; // 关闭所有IO数字输入
外设协同要点
- 定时器门控功能测量脉冲宽度(如水流传感器)
- 比较器+ADC实现硬件自动触发采样
通过极致性价比(如$0.07的PFS154驱动七段屏)与低功耗架构(睡眠电流0.1μA),Padauk在替代传统方案时具备显著优势。开发中需注意:OTP器件仿真验证前置、时钟校准需在5V/25℃环境进行、批量烧录利用FreePDK工具链降本
如需更详细的电路原理图或代码示例, 若对以上说明有不清楚之处或仍有其他疑问 请与 逐高电子技术方案开发部 sales11@zicoic.com 0755-88364040 联络 获取官方开发包。